































Introduction
As robots become more sophisticated, their ability to understand and interact with the world around them has drastically improved, thanks to advances in sensory technologies. Among these, LiDAR (Light Detection and Ranging) and camera-based vision systems stand out as two of the most crucial tools for robot perception. LiDAR excels in providing accurate depth information, while cameras are unparalleled in capturing rich color and texture details. Together, these technologies offer robots a comprehensive understanding of their environment, allowing them to perform tasks with precision and adaptability.
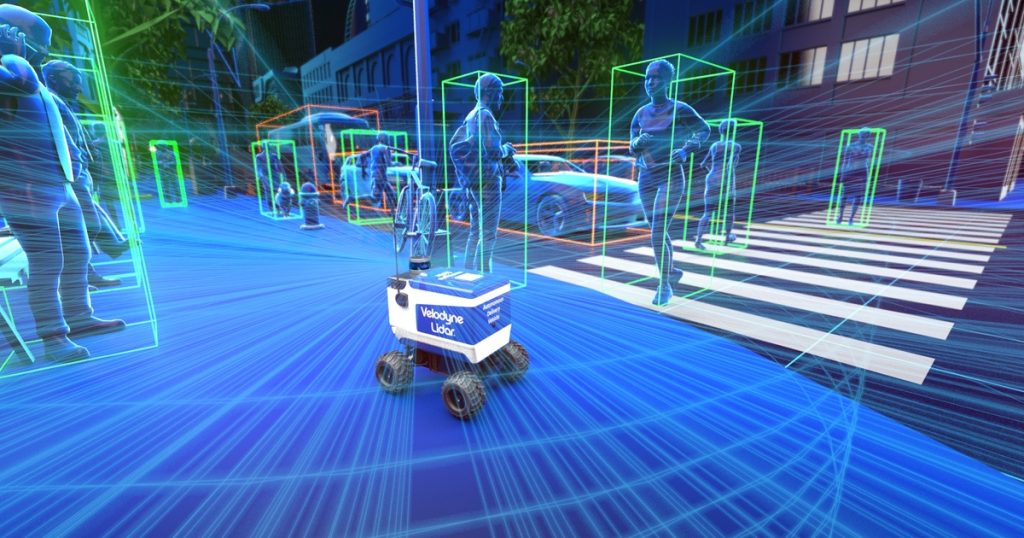
The fusion of LiDAR and camera data has become a key research area, particularly in autonomous systems like self-driving cars, drones, industrial robots, and robotic arms. While LiDAR provides precise 3D mapping by measuring distances to objects, cameras offer a rich, high-resolution view of the environment that includes color, texture, and patterns. When combined, these sensors enable robots to interpret both the physical structure and the visual appearance of the world in a way that is essential for complex tasks such as navigation, object manipulation, and human-robot interaction.
This article will explore the fundamentals of LiDAR and camera systems, their unique advantages, and the growing importance of sensor fusion in robotics. We will delve into how these technologies work together to enhance robot perception, examine their applications, and discuss the challenges and future trends in this field.
The Role of LiDAR in Robotic Perception
LiDAR is a sensing technology that uses laser pulses to measure distances to objects in a robot’s environment. It operates by emitting laser light in pulses and measuring how long it takes for the light to bounce back after hitting a surface. This time-of-flight measurement allows LiDAR sensors to create highly accurate 3D maps of the surroundings.
1. How LiDAR Works
LiDAR systems work by emitting light in the form of laser pulses at a very high frequency. The system then records the time it takes for each pulse to return after striking an object. By knowing the speed of light, the system can calculate the distance between the sensor and the object. Multiple measurements are taken rapidly, enabling LiDAR to generate a detailed 3D map of the environment in real-time.
LiDAR systems are commonly used in terrestrial, aerial, and underwater applications, but in robotics, they are predominantly used for autonomous navigation and obstacle detection. By continuously scanning the environment, LiDAR creates a “point cloud” of data, where each point represents a precise measurement of the environment’s shape and distance.
2. Advantages of LiDAR in Robotics
- Precision and Accuracy: LiDAR systems provide highly accurate depth information, which is crucial for precise navigation and obstacle detection. The ability to measure distances with millimeter accuracy allows robots to avoid obstacles and move through cluttered environments with confidence.
- 360-Degree Coverage: LiDAR sensors can be mounted on top of a robot to provide 360-degree scanning of the environment. This gives robots a complete view of their surroundings, which is particularly useful for applications like autonomous driving, where the robot must be aware of objects in all directions.
- Works in Low-Light Conditions: LiDAR does not depend on ambient light, making it effective in both bright and dark environments. Unlike cameras, which require sufficient light to capture clear images, LiDAR sensors can work in complete darkness, making them suitable for nighttime operation or indoor navigation in low-light conditions.
- Weather Resilience: LiDAR sensors can operate in a variety of environmental conditions, including rain, fog, or snow. Unlike cameras, which may struggle in adverse weather, LiDAR’s performance is less impacted by visibility issues, although heavy precipitation may still interfere with its accuracy.
3. Applications of LiDAR in Robotics
LiDAR is widely used in various robotic applications due to its precision and reliability. Key applications include:
- Autonomous Vehicles: LiDAR plays a crucial role in enabling self-driving cars to perceive the road, detect other vehicles, pedestrians, and obstacles, and create a 3D map of the environment for path planning.
- Robotic Mapping: Robots in industrial and warehouse settings use LiDAR for creating detailed floor plans, performing inventory management, and guiding robots safely through dynamic environments.
- Drone Navigation: LiDAR-equipped drones can map large areas quickly and accurately, making them invaluable in sectors like agriculture, environmental monitoring, and infrastructure inspection.
- Robot Navigation: LiDAR helps mobile robots avoid obstacles while navigating through complex spaces. It is also essential for indoor robots that need to move through unknown or unstructured environments.
Camera-Based Vision: Capturing Color and Texture Information
While LiDAR provides precise depth data, cameras excel at capturing rich color and texture information. Unlike LiDAR, which only provides geometric data, cameras allow robots to perceive the appearance of objects in vivid detail, offering insights into color, shape, and texture. Camera-based vision is essential for tasks that involve object recognition, visual inspection, and human-robot interaction.
1. How Cameras Work in Robotics
Cameras used in robotic systems typically include RGB cameras (which capture color images) and depth cameras (which capture both color and depth information). Stereo vision systems, for example, use two or more cameras to capture images from different perspectives, which are then processed to create a 3D representation of the scene.
Cameras capture images through a lens, and the light that passes through the lens is converted into digital signals by a sensor, typically a CCD (Charge-Coupled Device) or CMOS (Complementary Metal-Oxide-Semiconductor) sensor. These sensors capture millions of pixels of color data, which are then processed to extract information about the environment.
2. Advantages of Camera-Based Vision
- Rich Color and Texture Information: Cameras provide detailed visual data about objects, including color, texture, and patterns. This is especially useful for tasks that require distinguishing between different objects or identifying objects based on appearance.
- High-Resolution Imaging: Cameras can capture high-resolution images, enabling robots to detect fine details. This capability is essential for applications such as visual inspection, facial recognition, and fine manipulation tasks.
- Cost-Effective: Cameras are relatively inexpensive compared to advanced sensors like LiDAR. This makes camera-based systems more accessible for a wide range of robotic applications.
- Dynamic Range: Modern cameras, especially those with high dynamic range (HDR), can capture details in both bright and dark areas of a scene. This makes them effective for applications where lighting conditions vary or are difficult to control.
3. Applications of Camera-Based Vision
Camera systems are crucial in a wide range of robotic applications, including:
- Object Recognition: Robots use cameras to recognize and classify objects based on their visual features. This is vital in applications like warehouse automation, where robots need to pick and place items based on their appearance.
- Human-Robot Interaction: Cameras are used to track human movements, recognize gestures, and understand emotional expressions, enabling more intuitive interactions between humans and robots.
- Autonomous Navigation: Cameras, in conjunction with computer vision algorithms, enable robots to recognize landmarks, read signs, and detect hazards, helping them navigate complex environments.
- Quality Inspection: Robots equipped with cameras are used for visual inspection in manufacturing, where they can detect defects, check product quality, and ensure that products meet specified standards.
Combining LiDAR and Camera Systems for Enhanced Robot Perception
While LiDAR and cameras provide different types of information, combining these technologies can significantly enhance a robot’s environmental perception. By fusing LiDAR’s precise depth data with the rich visual information from cameras, robots can gain a more comprehensive understanding of their environment.
1. Fusion Techniques for LiDAR and Camera Data
- Point Cloud Registration: LiDAR data is often represented as a “point cloud,” a collection of 3D points that describe the shape and distance of objects in the environment. By combining the point cloud data from LiDAR with the 2D images from a camera, robots can assign texture and color to the points in the 3D space. This process, known as point cloud registration, enables the robot to associate depth information with visual features, enhancing object recognition and scene understanding.
- Simultaneous Localization and Mapping (SLAM): SLAM algorithms are used to create real-time maps of the environment while simultaneously keeping track of the robot’s location. By integrating LiDAR and camera data into a SLAM system, robots can generate more detailed and accurate maps that include both geometric and visual information.
- Deep Learning for Sensor Fusion: Deep learning models, such as convolutional neural networks (CNNs), can be used to process and combine LiDAR and camera data for more advanced scene understanding. These models can learn to associate depth information with visual features and make decisions based on both types of data.
2. Benefits of LiDAR and Camera Fusion
- Enhanced Object Recognition: Combining LiDAR’s precise depth data with camera-based visual information allows robots to not only recognize objects but also identify their material, color, and texture. This is essential for tasks that require fine-grained object classification.
- Improved Obstacle Avoidance: The fusion of LiDAR and camera data helps robots detect obstacles more accurately and from different angles. LiDAR provides the geometric information needed for distance estimation, while cameras provide visual context to differentiate between various objects in the environment.
- Better Scene Understanding: The combination of 3D depth maps and 2D visual information enables robots to interpret complex scenes more effectively. This is particularly valuable in dynamic environments where the robot must respond to both static and moving objects.
- Realistic Interaction with Humans: In human-robot interaction, the integration of LiDAR and camera data allows robots to not only navigate around people but also recognize their gestures and facial expressions, facilitating more natural and intuitive communication.
Challenges and Future Directions
Despite the advantages of LiDAR and camera fusion, several challenges remain:
- Data Synchronization: LiDAR and cameras operate at different rates, which can make data fusion difficult. Ensuring that both sensors are synchronized in real-time is essential for accurate perception.
- Computational Complexity: Combining LiDAR and camera data requires significant computational power, particularly for real-time processing and machine learning-based fusion algorithms.
- Sensor Calibration: Both LiDAR and camera systems must be calibrated accurately to ensure that the data from each sensor aligns correctly in 3D space.
In the future, advancements in edge computing, sensor miniaturization, and AI algorithms will likely address these challenges, making sensor fusion more efficient and accessible for a broader range of robotic applications.
Conclusion
LiDAR and cameras, when used independently, offer complementary strengths in robotic perception—LiDAR provides precise depth information, while cameras offer rich color and texture details. By fusing these two types of data, robots can gain a more comprehensive understanding of their environment, enabling them to perform complex tasks with greater accuracy and efficiency. As sensor technologies continue to evolve and new fusion techniques are developed, the integration of LiDAR and camera systems will become even more powerful, unlocking new possibilities for robotics across various industries.












{kind=link}