






























1. Introduction
The field of 3D reconstruction has seen tremendous growth over the past two decades, driven by advances in computer vision, artificial intelligence (AI), and imaging technologies. Traditionally, the process of capturing the shape and structure of physical environments required expensive and specialized equipment like laser scanners and structured light systems. However, with the rise of multi-view image processing, it is now possible to generate accurate 3D models using only regular cameras, which are becoming increasingly ubiquitous in devices like smartphones, drones, and robots.
At its core, 3D reconstruction aims to capture the spatial configuration of objects and environments in three dimensions using a set of 2D images from different viewpoints. These images are processed to extract depth information, allowing the creation of a 3D model that can be manipulated or analyzed. The precision of this model depends on factors such as the number of images used, the quality of the images, and the algorithms employed.
In this article, we will explore how multi-view image processing is employed to generate detailed 3D models of environments, discussing the principles, key methods, challenges, and the wide-ranging applications of this technology.
2. The Basics of 3D Reconstruction
2.1 What is 3D Reconstruction?
3D reconstruction is the process of creating a 3D model of a real-world object or environment using 2D images captured from different viewpoints. It involves two main steps: structure-from-motion (SfM) and multi-view stereo (MVS).
- Structure-from-Motion (SfM): This is a technique used to reconstruct 3D points from a series of images taken from different angles. The algorithm identifies common features across images and uses the relative camera positions to triangulate the 3D coordinates of those features.
- Multi-View Stereo (MVS): Once 3D points are obtained through SfM, MVS refines the model by estimating the depth of each pixel in the images to generate a denser 3D point cloud. MVS improves the reconstruction by capturing finer details, such as texture and geometry, which are necessary for high-precision models.
2.2 Multi-View Image Processing
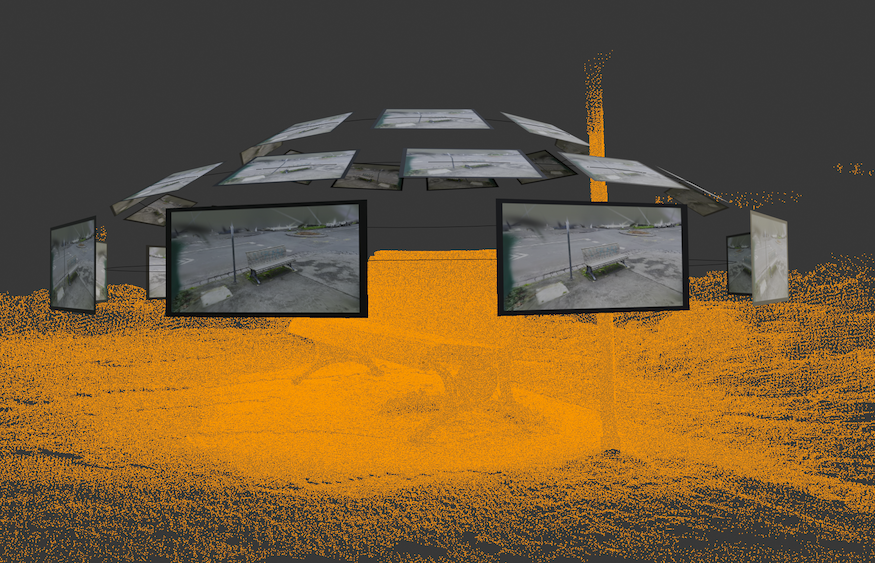
In the context of 3D reconstruction, multi-view image processing refers to the use of multiple 2D images taken from different viewpoints to reconstruct a three-dimensional model. These images are typically taken from various angles, using either a static camera setup or a moving camera (e.g., on a drone or robot).
Key processes in multi-view image processing include:
- Feature Detection and Matching: Identifying and matching common features (e.g., edges, corners) across multiple images.
- Camera Calibration: Determining the intrinsic and extrinsic parameters of the camera to relate 2D image coordinates to 3D world coordinates.
- Depth Estimation: Estimating the depth information for each pixel to reconstruct the spatial relationship between points.
- Bundle Adjustment: A refinement process that optimizes the camera parameters and 3D point coordinates to reduce error across all images.
3. Key Technologies and Algorithms in 3D Reconstruction
3.1 Stereo Vision and Depth Estimation
Stereo vision is one of the foundational techniques in 3D reconstruction. By using two or more cameras to capture images from different angles, stereo vision algorithms can estimate the depth of points in the scene by comparing the disparities between corresponding pixels in the images. The greater the disparity, the closer the object is to the camera. This technique is widely used in robotics and autonomous vehicles, where real-time depth information is crucial for navigation and object detection.
3.2 Structure-from-Motion (SfM)
Structure-from-Motion (SfM) is a method that reconstructs 3D structures from a collection of 2D images without requiring explicit depth information. SfM estimates the camera positions and orientations while simultaneously triangulating the 3D positions of feature points. SfM is typically the first step in 3D reconstruction workflows, providing an initial sparse 3D model of the environment.
3.3 Multi-View Stereo (MVS)
After the sparse 3D model is obtained through SfM, Multi-View Stereo (MVS) algorithms refine the reconstruction by estimating depth for each pixel in the images, producing a dense 3D point cloud. Popular MVS algorithms include:
- PMVS: A popular algorithm for dense reconstruction that works by selecting and matching visible points across all views.
- CMVS: An extension of PMVS that reduces computational complexity by dividing the image into smaller regions and processing them in parallel.
3.4 Photogrammetry and Texture Mapping
Photogrammetry is the process of extracting three-dimensional information from two-dimensional photographs, often using advanced algorithms that analyze the geometry and appearance of objects. Once a 3D model is generated, texture mapping can be applied, where high-resolution images are mapped onto the 3D model to give it realistic surface details.
This technique is used in applications like creating realistic 3D models for cultural heritage preservation, video games, and virtual reality.
3.5 Deep Learning for 3D Reconstruction
Recent advances in deep learning have brought new methods for 3D reconstruction, with neural networks now able to predict depth information from single images, often outperforming traditional methods in terms of speed and robustness. Convolutional Neural Networks (CNNs) and Generative Adversarial Networks (GANs) are widely used in single-image 3D reconstruction tasks, where they learn to infer 3D structure from a 2D image by training on large datasets.

4. Applications of 3D Reconstruction
4.1 Robotics and Autonomous Vehicles
In robotics, 3D reconstruction is crucial for navigation, object recognition, and manipulation. Robots equipped with cameras can generate 3D maps of their environment in real time, allowing them to better understand spatial relationships, avoid obstacles, and interact with objects. In autonomous vehicles, 3D reconstruction is used to generate detailed maps of roads, traffic, and pedestrians, ensuring safe navigation.
4.2 Virtual and Augmented Reality
Virtual Reality (VR) and Augmented Reality (AR) rely heavily on 3D reconstruction to create immersive and interactive experiences. By using cameras to capture real-world environments, 3D models are generated in real-time, which can then be used in applications like gaming, virtual tours, or product visualization. For example, AR applications overlay 3D models on top of the physical world, requiring precise reconstruction to align virtual objects with the real world.
4.3 Urban Planning and Architecture
In the field of urban planning, 3D reconstruction allows for the creation of detailed models of cities or specific buildings. These models are essential for simulating urban growth, studying traffic patterns, and planning infrastructure projects. Similarly, in architecture, 3D models are used for design and visualization, helping architects and clients understand how a building will look in its real-world context.
4.4 Cultural Heritage Preservation
3D reconstruction plays an important role in preserving cultural heritage. Museums, archaeologists, and conservationists use 3D scanning and reconstruction to digitally preserve artifacts, monuments, and entire historical sites. These digital models can be studied in detail and shared with the public, helping to protect cultural heritage from degradation over time.
4.5 Medical Imaging
In medical imaging, 3D reconstruction is used to create detailed models of organs, bones, and other body structures from 2D medical scans like CT or MRI. These 3D models are invaluable for surgical planning, diagnosis, and treatment, providing a comprehensive view of a patient’s anatomy.
5. Challenges in 3D Reconstruction
While 3D reconstruction has made significant advancements, several challenges still exist:
5.1 Computational Complexity
Creating accurate and detailed 3D models from multiple images requires significant computational resources, particularly when working with large datasets or high-resolution images. Real-time processing remains a significant hurdle, especially for mobile or embedded devices with limited processing power.
5.2 Noise and Inaccurate Data
Images often contain noise, distortions, or occlusions that can complicate the reconstruction process. Inaccuracies in camera calibration, sensor alignment, and feature matching can also lead to errors in the final model. Addressing these issues requires robust algorithms that can filter out noise and handle imperfect data.
5.3 Scalability
While small-scale 3D reconstructions can be achieved with relative ease, scaling the process to large environments or large datasets (e.g., city-wide reconstructions) introduces new challenges in terms of memory, processing speed, and data management.
5.4 Real-Time Performance
For applications like robotics and AR, real-time 3D reconstruction is a necessity. Current methods often struggle to deliver accurate and detailed 3D models in real-time, especially under dynamic conditions where the environment is constantly changing.
6. Future Trends in 3D Reconstruction
The future of 3D reconstruction is closely linked to advancements in computer vision, AI, and sensor technology. Some promising areas include:
- AI-enhanced 3D reconstruction: Neural networks will continue to improve the speed and accuracy of 3D reconstruction by enabling systems to infer depth and structure from images without relying on traditional algorithms.
- Fusion of Multi-Sensor Data: Combining information from different types of sensors, such as LiDAR, infrared cameras, and visual cameras, will lead to more accurate and comprehensive 3D models, especially in challenging environments.
- Real-time 3D reconstruction: Advancements in GPU processing and edge computing will make it possible to generate high-quality 3D models in real-time, enabling more responsive and intelligent systems.
Conclusion
3D reconstruction through multi-view image processing is one of the most powerful tools in computer vision, enabling the generation of highly accurate and detailed models of real-world environments. The advancements in algorithms and computing power have brought this technology closer to real-world applications in robotics, autonomous systems, AR/VR, and urban planning. However, challenges remain in terms of computational efficiency, real-time performance, and handling noisy data. As research continues and technology advances, the potential for 3D reconstruction will only expand, opening up new possibilities for both industry and society.












{kind=link}